Robotic Container Lab
for Lollipop Sample Preparation & OES Analysis


Robotic Container Lab for Lollipop Sample Preparation & OES Analysis
is fully automated and shall be used for sample preparation for rapid and accurate analysis of Metal samples without any manual intervention.
It shall basically consist of sample introduction facility, automated sample preparation system, master control system, automated software, robot system, vision system, Optical Emission Spectrometer, sample holding system, sample identification marking system and sample storage system.
All the above laboratory components are integrated within a room having a size 10’X20′ provided by client. The operator shall place the steel samples into semi automated tail cutting machine placed outside the Container Lab. The operator will inspect the sample for having proper shape and size, in case there are fins around the sample periphery, the operator will grind the sample to obtain smooth surface in the periphery to facilitate proper grip by the Robotic gripper arms. A pedestal grinder is provided outside the Container lab near pin cutter.
The operator places the OK sample (after cutting the tail and smoothening the periphery of the sample) at the sample entry station called the input station of the Container laboratory, the sample identification is fed in the HMI manually and activates cycle start instruction. The sample shall be picked up by Robot and shall be placed in the automatic milling machine where the sample preparation shall be performed.
The sample shall be handled from one spark position to the next position by means of robot system. After the analysis is over, the result will be automatically transmitted to the predefined destination for the user for further transmission as desired. Finally the sample shall be passed to the storage bin after automatically printing the identification of the sample for future traceability.
The complete analysis device shall be cleaned & the spark stand shall be sealed automatically to avoid contamination by incoming air, when there is no cleaning activity.

Sample entry station/ sample transport unit:
Sample shall be placed manually into the input station &
Identification number of sample shall be entered at the
ID terminal manually, matching to existing system.

Sample preparation unit:
Samples shall be prepared in automatic milling machine controlled by PLC.
Sample feeding to the spectrometer and removal after analysis shall be done by the robot. The machine will have the following modules.
– Common sample input & output position.
– Automatic movable sample entrance & exit flap.
– Air cooling during milling.
– Operating panel.
– Simple & fast exchange of milling head system

Sample handling by robot:
The robot shall do complete handling of sample, starting from receiving of sample from the sample receiving station, transport to the milling machine upto OES.
The robot will be equipped with pneumatic grippers for best possible speed of operation.

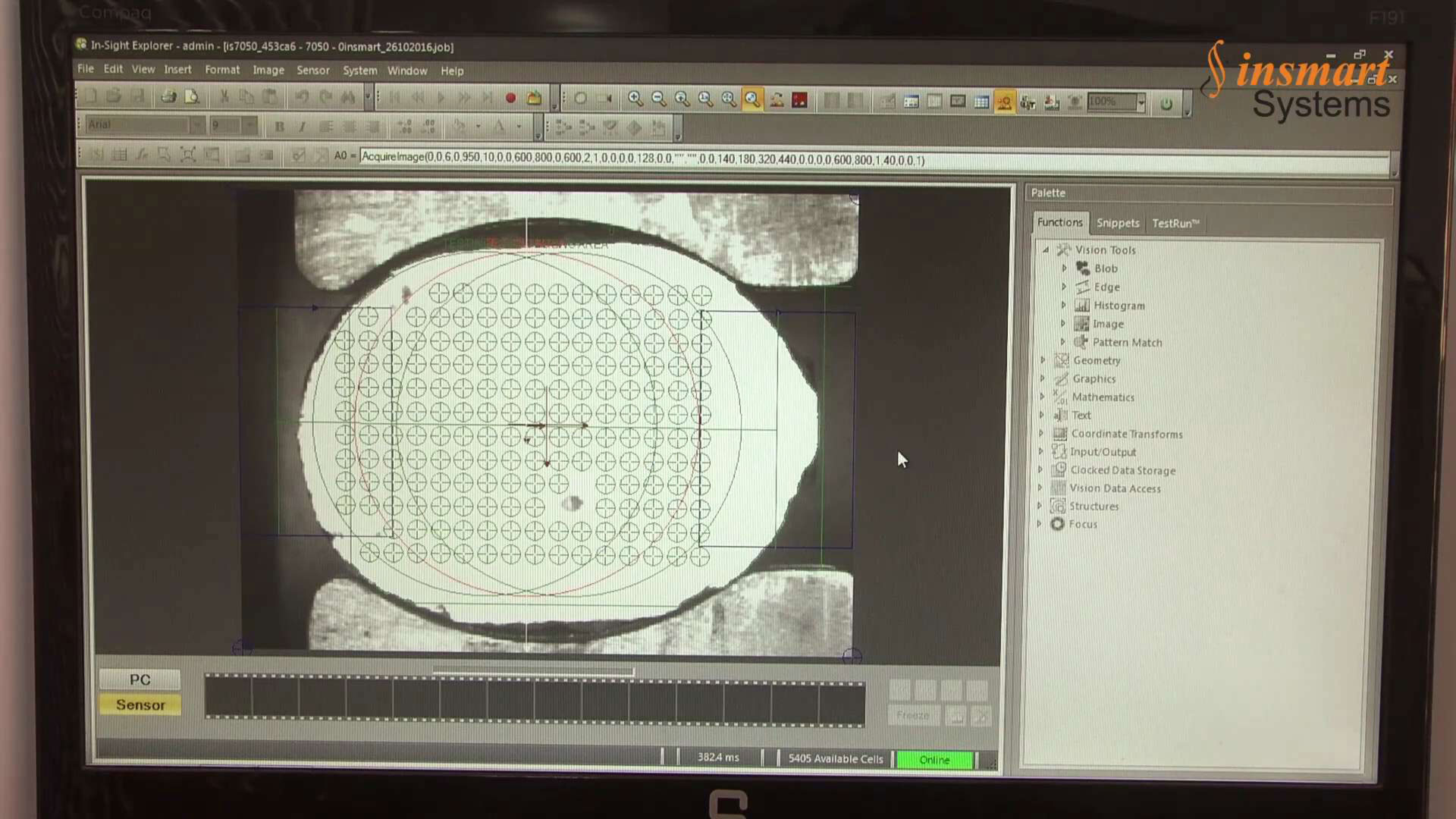
Vision system for surface inspection of the sample:
It will be capable of detecting the surface defects of the prepared samples such as holes, inclusion & cracks leading to bad spark.

Optical Emission Spectrometer with Spark stand automatic type:
The system shall consist of the following
1. Pneumatically actuated combined sample clamping & electrode cleaning system
2. Manual control unit with selection for manual and automatic operation
3. Set of pneumatic control valves

Argon Gas Manifold:
Supply of 6 nos of Grade-1 quality argon gas cylinders in the scope of VSP. Argon cylinder manifold for continuous supply of argon to the OES is included in the offer. Argon gas purifier will be in the scope of the Insmart systems.

Sample Labeling System
Printing of sample identification machine by engraving.
Control System
To assure the best possible sample throughput when several samples have to be processed, it is possible to handle upto 2 production samples at a time, one after the other.
1. Sample identification
2. Handling of sample
3. Start and handling of monitor (setting of samples) will be done at regular intervals both manually & automatically
4. Status of all the system
5. Failure message system

Un interrupted power supply (UPS):
Online UPS of suitable rating to give backup of 30 min. at full load to be provided for the following equipments: Spectrometer, Spectrometer PC & Robots. Battery bank shall be installed in cabinets with insulated base suitable for industrial use and shall be equipped with all other accessories required
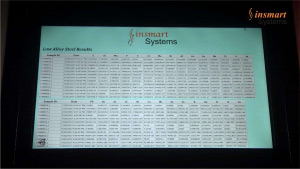
Analytical Result Transmission:
The analytical result with regard to the sample identification shall be made available by Insmart Systems in an open, computer readable database. The physical connectivity of the LAN/Ethernet cable from the plant to the Container lab will be provided by VSP. Insmart Systems will store the results in an open database that is readable.